 Cette page est en construction.
Le soutien RailDriver JMRI a d'abord été disponible en JMRI 2.1.7. Il évolue rapidement, alors
revenez ici ou sur le jmriusers mailing liste
pour des changements.
Cette page est en construction.
Le soutien RailDriver JMRI a d'abord été disponible en JMRI 2.1.7. Il évolue rapidement, alors
revenez ici ou sur le jmriusers mailing liste
pour des changements.
JMRI vous permet d'utiliser un RailDriver à partir de PI Engineering comme un régulateur pour les locomotives avec votre système DCC.
Tout d'abord, connectez votre ordinateur à votre système DCC et faire en sorte que les Régulateurs JMRI, fonctionnent bien. (Sauf si vous faites cela d'abord, le débogage des problèmes possibles à la connexion des RailDriver est très difficile)
Ensuite, branchez le RailDriver dans un port USB sur votre ordinateur pendant que votre application JMRI (PanelPro ou DecoderPro) ne fonctionne pas..
Enfin, lancez le programme JMRI et sélectionnez "Throttle RailDriver" dans le menu Debug.
(Il est temporairement là pendant que nous développons le support) Une fenêtre régulateur
avec le titre "RailDriver" devrait s'ouvrir.
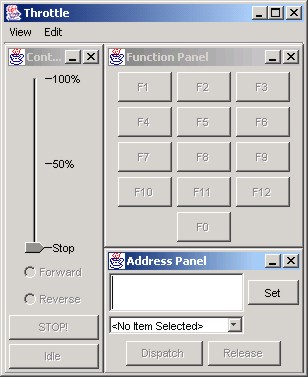
Tapez l'adresse de votre locomotive (adresse DCC) dans la zone adresse, tout comme un régulateur JMRI, et cliquez sur "Set". Ceci relie les deux fenêtre régulateur et la console RailDriver à travers le système DCC pour le décodeur. Vous devriez maintenant être en mesure de conduire la locomotive depuis le RailDriver.
La rangée supérieure de boutons sur le bord avant contrôle les fonctions du décodeur. Le plus à gauche (1 dans la figure) est F0, habituellement le phare. Le bouton à côté de la droite (2 dans la figure) est F1, etc Lorsque vous appuyez sur le bouton, la fonction bascule: de Off à On ou de On sur Off. Essayez d'appuyer sur un, et de voir si les touches de fonction du régulateur sur l'écran et les fonctions dans la locomotive répondent.
Le bouton "Bell" (37 sur la figure) pilote F3 (cela peut être changé par la modification d'un fichier dans la distribution JMRI si votre système DCC utilise quelque chose de différent). C'est momentanée, alors F3 est On lorsque le bouton est pressé, et Off quand il est libéré.
Le levier de la corne (38 sur la figure) opère sur F2. Poussez vers l'avant ou revenir pour mettre F2 sur On, et libérez ou centrez de manière à mettre F2 sur Off.
La poignée de gauche la plus grande, étiquetée "Avant N Arrière" (39 sur la figure) sert à contrôler la direction. Depuis (la plupart) que les décodeurs DCC n'ont pas de position neutre, la position N n'est pas utilisée.
Le levier suivant, intitulée "Régulateur frein Dyn" (40 sur la figure), contrôle le réglage de la vitesse du décodeur Pour l'instant, la vitesse zéro est (grossièrement) le centre, et les vitesses supérieures sont lorsque le levier est tiré vers l'arrière.
Finalement, nous aimerions faire une simulation plus détaillée disponible en connectant le reste des commandes, et en ajoutant un modèle détaillé de trains en freinage et en accélaration.
Pour des renseignements techniques, s'il vous plaît voir la page de détails.